31 Jan 2026
Congratulations to MAgIC Lab for the paper accepted by ICRA2026.
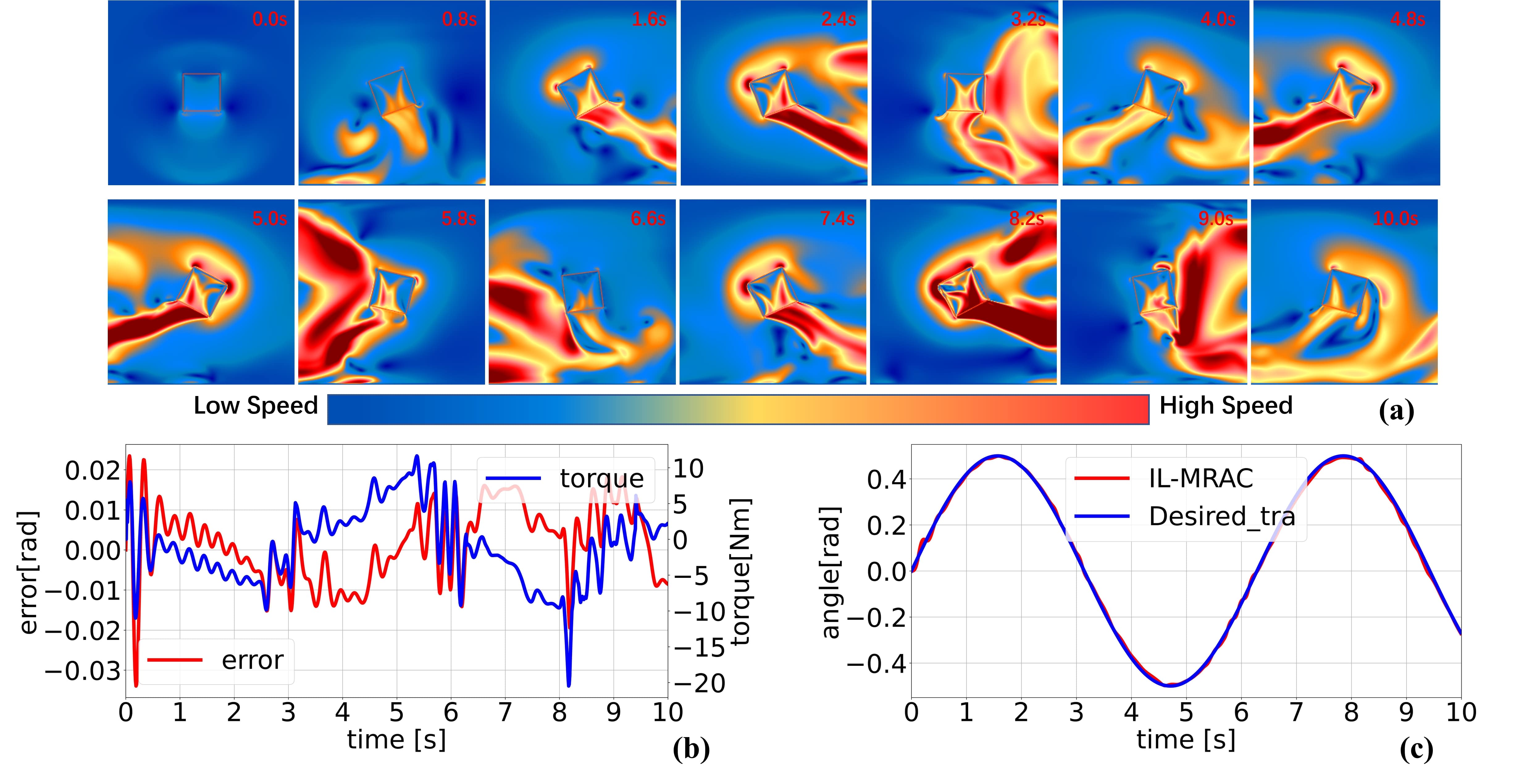
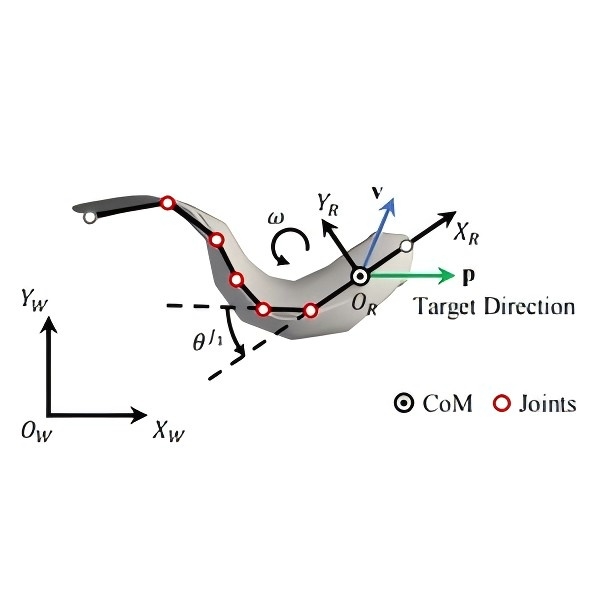
The paper entitled 'Agile and Controllable Omnidirectional Fast-start Maneuvers of Robotic Fish via Bio-inspired Reinforcement Learning' has been accepted for publication in IEEE ICRA. This paper presents a deep reinforcement learning framework for multi-joint robotic fish to reproduce biologically inspired C-start fast-start maneuvers under highly unsteady fluid dynamics. By embedding key biological features into the learning design and training in a high-fidelity CFD environment, the method enables robotic fish to autonomously discover effective launch strategies and achieve controllable high-acceleration motions with improved speed and maneuverability.