The growing complexity of robotic systems and their deployment in unpredictable environments poses significant challenges to traditional model-based control methods, where obtaining accurate mathematical models is difficult and designing controllers based on such models remains non-trivial. As a result, data-driven model-free approaches—especially reinforcement learning—have attracted considerable attention. However, these methods require large amounts of training data, making simulation an essential component of the development process. This heavy reliance on simulation introduces a new central challenge: ensuring that policies learned in simulation transfer reliably to real-world platforms—a task referred to as sim-to-real transfer, which is hindered by the well-known sim-to-real gap.
In our lab, we address this core issue for fluid-interactive robots—such as underwater and aerial systems—through a structured approach built on high-fidelity CFD-based virtual simulations. We systematically study methods to bridge the sim-to-real gap, including real-to-sim calibration through automated parameter identification and robust sim-to-real transfer enhanced by adaptive control. Furthermore, we investigate the implicit relationship between simulation accuracy and controller performance, aiming to develop simulators that offer both precision and computational efficiency. This enables efficient and robust design, planning, and control of fluid-interactive robotic systems.
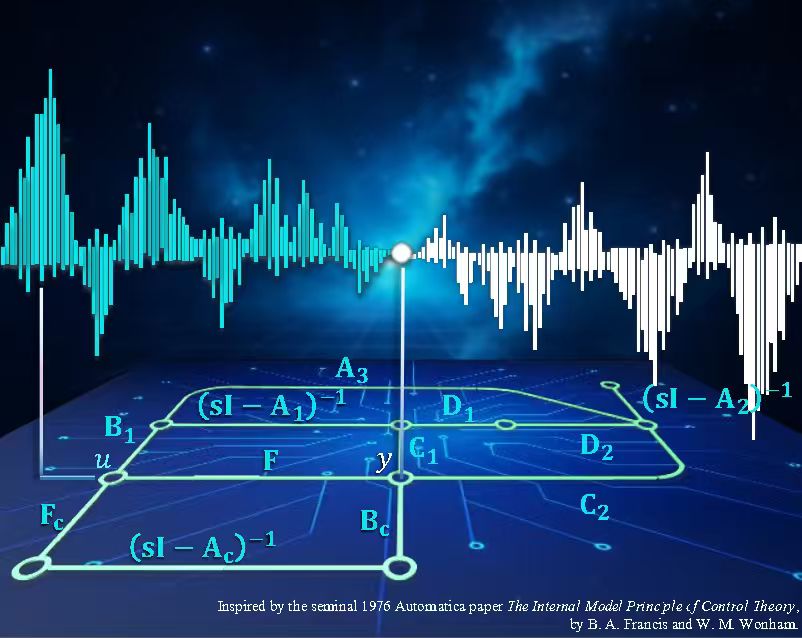
Output regulation stands as a cornerstone of modern control theory, addressing a fundamental problem: how to design controllers that ensure a system's output accurately tracks a desired reference or rejects persistent disturbances, even in the presence of modeling uncertainties and external perturbations. Its significance spans numerous domains, from industrial automation to aerospace systems, where precise and robust performance is critical.
In the MAgIC Lab, we focus on the challenge of achieving high-performance disturbance rejection in systems without relying on precise mathematical models. This involves solving nonlinear control problems with a novel feedforward adaptive control framework. Not only have we made theoretical breakthroughs—such as removal of the SPR-like conditions—but we have also successfully applied these advancements to real-world engineering applications. A key example is active noise control, where our control strategies have demonstrated exceptional effectiveness in attenuating periodic acoustic disturbances.
Bio-inspired robotic fish offer exceptional capabilities in terms of high efficiency, strong maneuverability, and low acoustic noise, making them ideal for applications such as underwater exploration, ecological monitoring, and search and rescue missions in complex aquatic environments.
In the MAgIC Lab, we focus specifically on achieving agile and natural fish-like locomotion—including fast-start, sharp turning, and sudden braking—in robotic fish employing BCF (Body/Caudal Fin) propulsion. To address the highly nonlinear dynamic and fluid-related nature of such maneuvers, our research utilizes Deep Reinforcement Learning (DRL) within a physically consistent and highly-efficient Computational Fluid Dynamics (CFD)-based simulation environment. This approach allows us to develop model-free, end-to-end control policies without relying on explicit hydrodynamic models or bottom level controller like Central Pattern Generator (CPG).
In addition to data-driven control strategies, we also investigate the fundamental mechanisms behind the agile swimming behaviors of real fish, aiming to bridge biological principles with engineering design. By combining CFD-based simulations with intelligent learning approaches, we strive to unlock unprecedented agility and efficiency in underwater robotic systems.

Most existing studies on robotic fish operate in still water, significantly limiting their applicability in natural aquatic environments characterized by complex and dynamic background flows. While real fish effortlessly perceive and maneuver through such nonlinear and turbulent conditions, current robotic systems lack this capability.
To bridge this gap, our lab has developed a pioneering digital twin system for this topic, namely Swimming with Flow Toolbox (SwiFT). This platform consists of a large physical background flow pool capable of generating controlled background currents and a physical consistent CFD-based virtual simulation environment. Utilizing a systematic real-to-sim calibration and sim-to-real transfer methodology, we investigate advanced perception and control strategies for robotic fish in background flows. Our research includes artificial lateral line systems (ALLS) for ambient flow sensing, proprioception-based data-driven modeling, and learning-based intelligent station-holding policies.
Through this work, we aim not only to enable the robust deployment of robotic fish in complex real-world water environments but also to contribute to biological discoveries by revealing the mechanisms behind the remarkable flow-resistant abilities of natural fish.

While flight control for drones, particularly quadrotors, in open spaces is considered well-solved, the emerging low-altitude economy demands reliable operation in complex and constrained environments. Navigating in close proximity to obstacles introduces significant challenges, as drones experience strong nonlinear and time-varying proximity effects that disrupt stability and control. However, there exists a clear dependency among the geometric structure of these confined spaces , the vehicle's state and the aerodynamic disturbances it encounters.
To address this frontier problem, our lab has established a dedicated confined-space flight research platform, featuring a multi-motion gantry system for real-world testing paired with a high-fidelity CFD simulation environment. By integrating data-driven modeling, adaptive control, and sim-to-real transfer techniques, we have developed a series of advanced flight strategies. These enable capabilities such as stable hovering and landing on moving platforms, high-speed maneuvering near the ground, precision docking in tight spaces, and reliable navigation through complex tunnel environments.
Our research aims to substantially expand the operational boundaries of quadrotors and ensure robust performance under extreme conditions. This work lays a critical foundation for future applications in emergency response, disaster rescue, cargo transportation, and the seamless integration of drones into transportation networks.
We collaborate widely with partners in academia and industry to push the frontiers of agile aerial robotics.
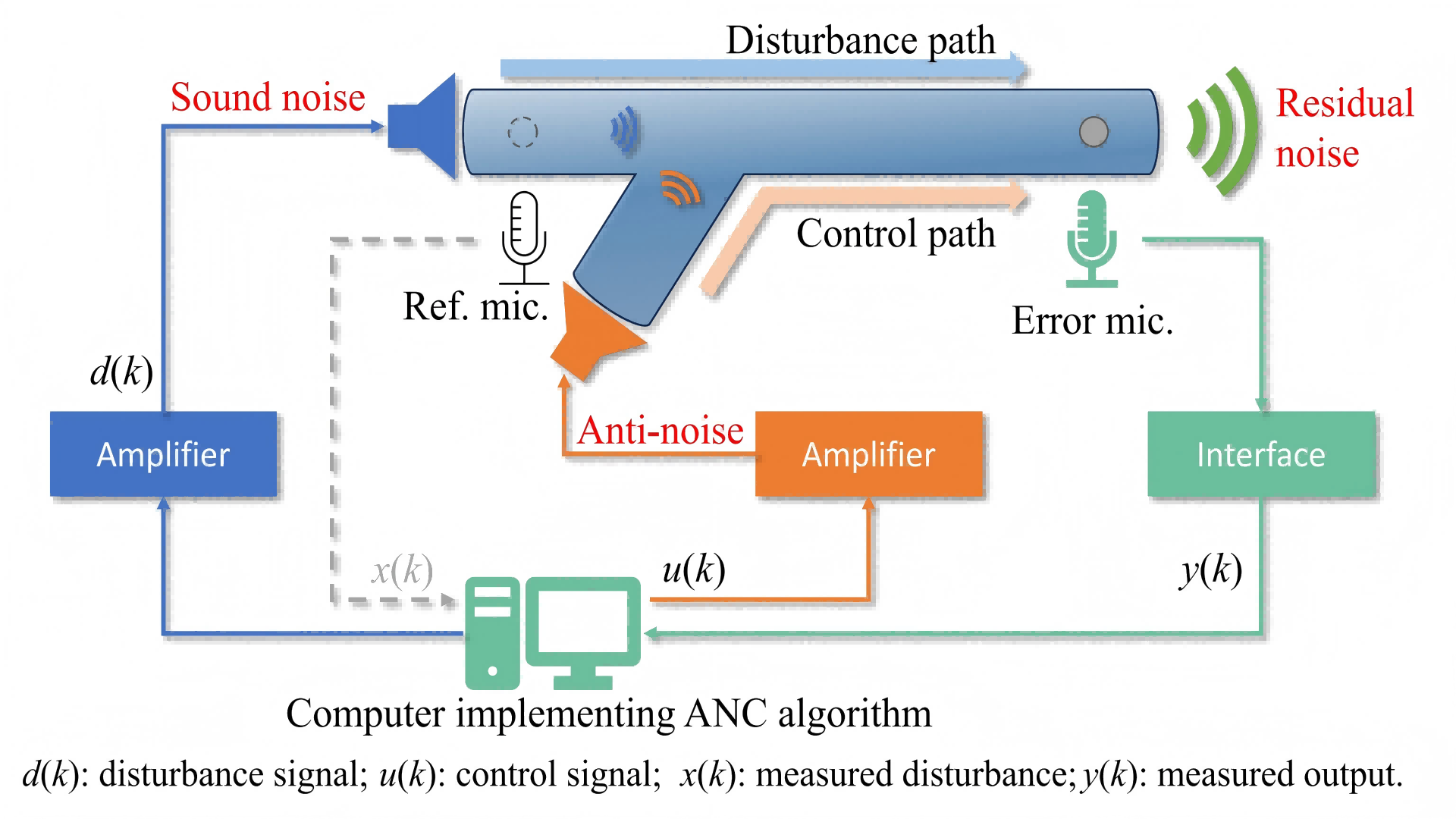
Spatial Active Noise Control (ANC) is a cutting-edge technology aimed at creating quiet zones in open or enclosed three-dimensional spaces. It holds significant promise for a wide range of applications, such as improving acoustic comfort in airplane cabins, car interiors, offices, and open-plan workspaces, where traditional passive noise reduction methods are ineffective or impractical.
In the MAgIC Lab, we are tackling the fundamental challenges in spatial ANC—including highly nonlinear, time-varying, and unmodeled acoustic dynamics—by innovatively integrating adaptive control based on the internal model principle with advanced signal processing techniques. Furthermore, we pioneer the use of multi-agent system frameworks, enabling distributed and cooperative noise cancellation architectures that better adapt to complex spatial environments.
To support this research, we have developed a dedicated hardware platform comprising an acoustic wave tube array, along with a high-fidelity virtual simulation environment. This integrated setup allows efficient development, testing, and validation of our novel control algorithms, effectively bridging theoretical innovation and real-world applicability.
The next frontier for autonomous drones lies in transitioning from pre-defined tasks in structured settings to genuine cognitive reasoning in complex, unknown environments. While current systems excel at trajectory tracking and obstacle avoidance, they lack the semantic understanding and adaptive decision-making required for high-level tasks in confined spaces. Our research explores the integration of multimodal large language models (MLLMs) with unmanned aerial vehicles to create what we term "embodied aerial intelligence".
We focus on enabling UAVs to operate autonomously in challenging, GPS-denied environments such as indoor environment, structured industrial spaces, and disaster-affected areas. By leveraging the contextual understanding and reasoning capabilities of foundation models, our drones can interpret natural language commands, build semantic maps of their surroundings, and make intelligent decisions in real time. This capability represents a shift from low-level motion planning to high-level autonomous reasoning and task understanding, allowing the system to understand abstract concepts like "search the farthest room" or "inspect the damaged structure" and execute such missions safely and efficiently.
Combining advanced perception, real-time simulation, and robust adaptive control, our work aims to create a new generation of aerial robots that not only fly but also perceive, reason, and act in complex spaces. This research has promising applications in areas such as emergency response, automated inspection, and autonomous logistics.